D.
Table tournante pour mesure polaire en automatique !
-
Dagda

- Fondateur
- Messages : 2226
- Enregistré le : 08 mars 2024, 17:16
- Localisation : Est parisien (94)
- Contact :
Re: Table tournante pour mesure polaire en automatique !
Certes ... et ça va pas s'arranger de suite ... 
D.
D.
https://www.youtube.com/@SoundPixelLab
La tolérance atteindra un tel niveau que les personnes intelligentes seront interdites de toutes réflexions pour ne pas offenser les imbéciles.
La tolérance atteindra un tel niveau que les personnes intelligentes seront interdites de toutes réflexions pour ne pas offenser les imbéciles.
Re: Table tournante pour mesure polaire en automatique !
Mais qu'ils sont taquins .... 

Re: Table tournante pour mesure polaire en automatique !
Nous sommes en période de vacances, un peu d'indulgence 

"La musique c'est du bruit qui pense" Victor HUGO
-
Dagda
- Fondateur
- Messages : 2226
- Enregistré le : 08 mars 2024, 17:16
- Localisation : Est parisien (94)
- Contact :
Re: Table tournante pour mesure polaire en automatique !
Oyez Oyez !
Le projet devrait bientôt repartir !
J'ai tout le matos, il me manque simplement le bois pour faire l'assemblage.
Ensuite il y aura une impression de poulie à faire et toute la programmation (CyrilA sera exploité pour cette partie )
D.
Le projet devrait bientôt repartir !
J'ai tout le matos, il me manque simplement le bois pour faire l'assemblage.
Ensuite il y aura une impression de poulie à faire et toute la programmation (CyrilA sera exploité pour cette partie
D.
https://www.youtube.com/@SoundPixelLab
La tolérance atteindra un tel niveau que les personnes intelligentes seront interdites de toutes réflexions pour ne pas offenser les imbéciles.
La tolérance atteindra un tel niveau que les personnes intelligentes seront interdites de toutes réflexions pour ne pas offenser les imbéciles.

Re: Table tournante pour mesure polaire en automatique !
Chouette! Un peu d'esprit pour une fois!
Je peux pas: j'ai piscine!

Re: Table tournante pour mesure polaire en automatique !
Je pense qu’on va aussi faire le drive moteur. Et finalement un contrôle à l’arduino ou STM32.
-
Dagda
- Fondateur
- Messages : 2226
- Enregistré le : 08 mars 2024, 17:16
- Localisation : Est parisien (94)
- Contact :
Re: Table tournante pour mesure polaire en automatique !
Petit point avancement.
Pour le pilotage moteur je suis parti sur un carte STM32 nucleo-F411RE + driver moteur X-nucleo-IHM03A1.
Je suis en train d'apprendre à me servir de tout ça (code python + programmation du STM32).
Il faut que j'achète la version payante de REW pour avoir accès aux APIs
J'ai trouvé un générateur de roue dentée ce qui me permettra d'avoir une roue à la bonne taille vis à vis de la courroie que j'ai !
Ça avance !
D.
Pour le pilotage moteur je suis parti sur un carte STM32 nucleo-F411RE + driver moteur X-nucleo-IHM03A1.
Je suis en train d'apprendre à me servir de tout ça (code python + programmation du STM32).
Il faut que j'achète la version payante de REW pour avoir accès aux APIs
J'ai trouvé un générateur de roue dentée ce qui me permettra d'avoir une roue à la bonne taille vis à vis de la courroie que j'ai !
Ça avance !
D.
https://www.youtube.com/@SoundPixelLab
La tolérance atteindra un tel niveau que les personnes intelligentes seront interdites de toutes réflexions pour ne pas offenser les imbéciles.
La tolérance atteindra un tel niveau que les personnes intelligentes seront interdites de toutes réflexions pour ne pas offenser les imbéciles.
Re: Table tournante pour mesure polaire en automatique !
Ça avance bien tout ça!
Re: Table tournante pour mesure polaire en automatique !
Du moment qu'il y a des roues... ça avance...
Je peux pas: j'ai piscine!
-
Dagda
- Fondateur
- Messages : 2226
- Enregistré le : 08 mars 2024, 17:16
- Localisation : Est parisien (94)
- Contact :
Re: Table tournante pour mesure polaire en automatique !
Ma petite planche de test pour jouer avec la programmation ...

https://www.youtube.com/@SoundPixelLab
La tolérance atteindra un tel niveau que les personnes intelligentes seront interdites de toutes réflexions pour ne pas offenser les imbéciles.
La tolérance atteindra un tel niveau que les personnes intelligentes seront interdites de toutes réflexions pour ne pas offenser les imbéciles.
-
Dagda
- Fondateur
- Messages : 2226
- Enregistré le : 08 mars 2024, 17:16
- Localisation : Est parisien (94)
- Contact :
Re: Table tournante pour mesure polaire en automatique !
Salut les copains 
Bon, j'ai réussi à avancer !
J'ai récupéré du CP (merci la réserve des arts pas loin de chez moi).
J'ai tracé les plans et GO !
Je colle le plan de la base sur la première planche pour avoir ma base de travail.
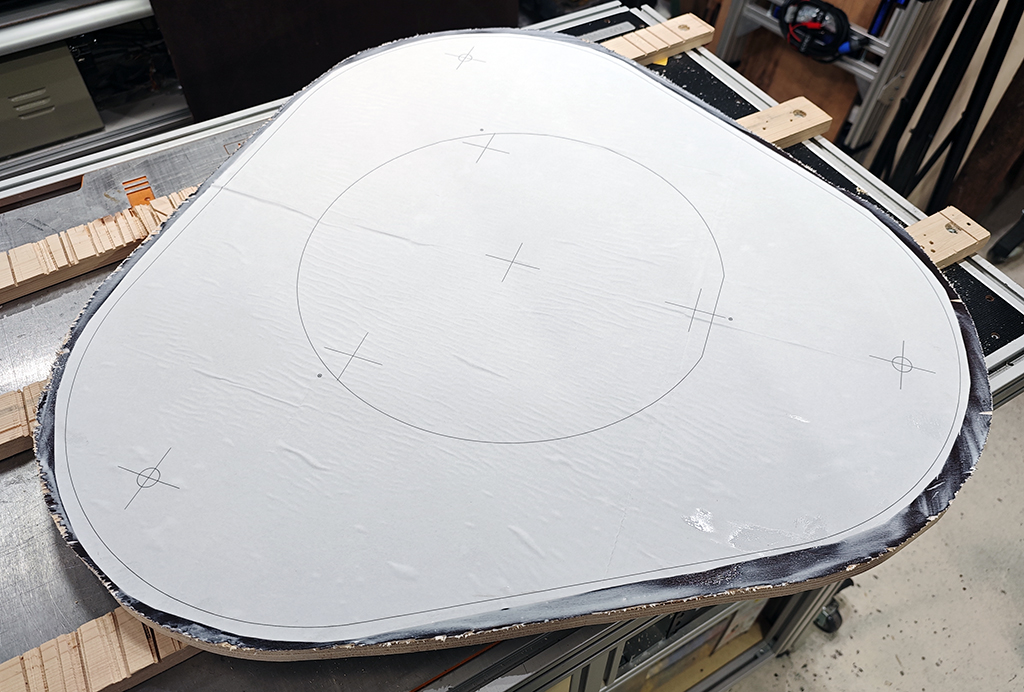
Découpage

Prédécoupage de la seconde plaque
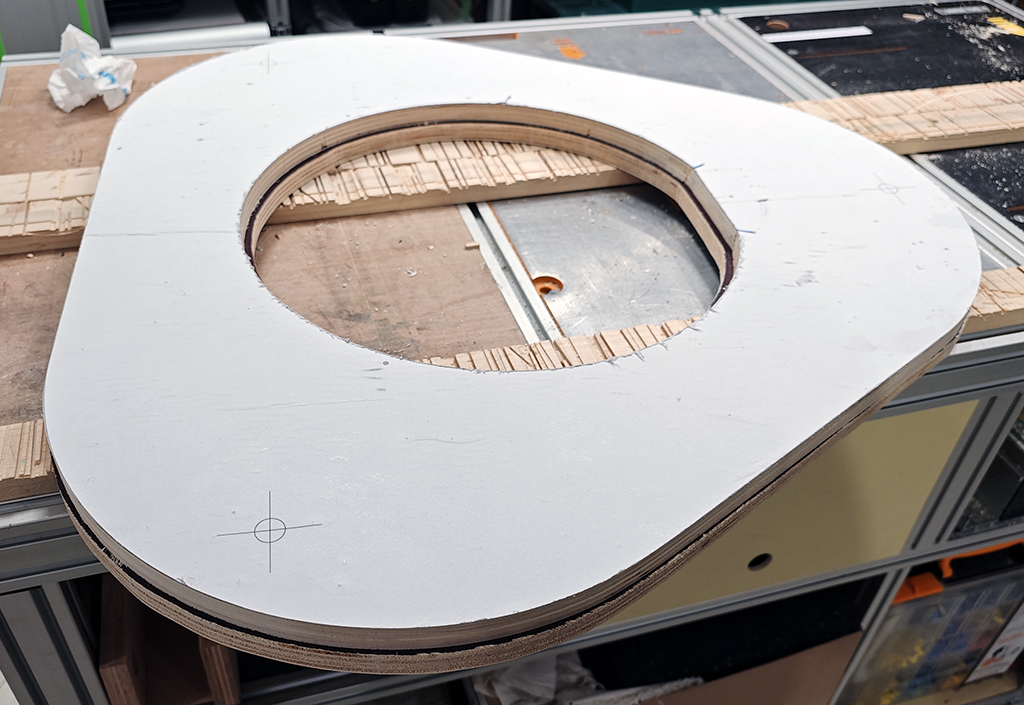
Collage

Idem sur la partie tournante

Ensuite, on attaque les détails avec le gros roulement et les platines pour les pieds.


La couronne / roulement ayant des vis à mettre sur les deux parties, il faut pouvoir accéder à la seconde partie une fois la couronne fixée sur le plateau tournant.
Donc, petit trou pour accéder aux vis !


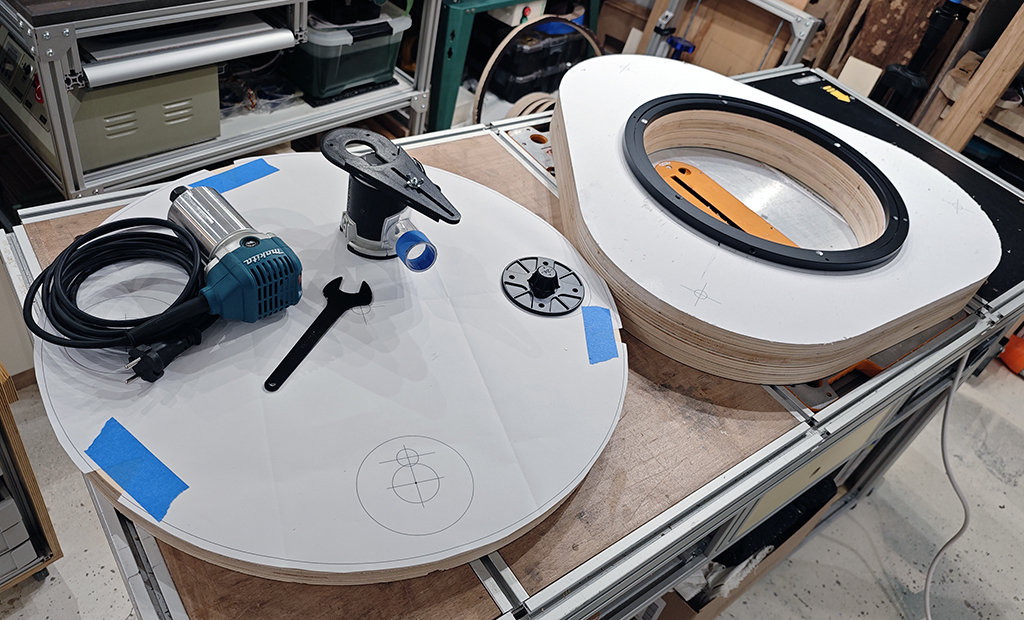
Et un premier montage à blanc.

Il reste encore un peu de travail.
Il faut que je monte le moteur et que j'imprime la couronne / poulie pour entrainer le plateau tournant.
Il y a aussi les deux barres de liaison entre le pied réglable et les deux jambes d'équilibrage.
Il faut aussi mettre 3 pieds
Faire une peinture
Faire les marquages tout les 10°
Faire les plaques pour poser les enceintes
Bref, il y a encore un peu de boulot mais elle pourra déjà être fonctionnelle en mode manuel dans un premier temps.
D.
Bon, j'ai réussi à avancer !
J'ai récupéré du CP (merci la réserve des arts pas loin de chez moi).
J'ai tracé les plans et GO !
Je colle le plan de la base sur la première planche pour avoir ma base de travail.
Découpage
Prédécoupage de la seconde plaque
Collage
Idem sur la partie tournante
Ensuite, on attaque les détails avec le gros roulement et les platines pour les pieds.
La couronne / roulement ayant des vis à mettre sur les deux parties, il faut pouvoir accéder à la seconde partie une fois la couronne fixée sur le plateau tournant.
Donc, petit trou pour accéder aux vis !
Et un premier montage à blanc.
Il reste encore un peu de travail.
Il faut que je monte le moteur et que j'imprime la couronne / poulie pour entrainer le plateau tournant.
Il y a aussi les deux barres de liaison entre le pied réglable et les deux jambes d'équilibrage.
Il faut aussi mettre 3 pieds
Faire une peinture
Faire les marquages tout les 10°
Faire les plaques pour poser les enceintes
Bref, il y a encore un peu de boulot mais elle pourra déjà être fonctionnelle en mode manuel dans un premier temps.
D.
https://www.youtube.com/@SoundPixelLab
La tolérance atteindra un tel niveau que les personnes intelligentes seront interdites de toutes réflexions pour ne pas offenser les imbéciles.
La tolérance atteindra un tel niveau que les personnes intelligentes seront interdites de toutes réflexions pour ne pas offenser les imbéciles.
Re: Table tournante pour mesure polaire en automatique !
Manuel, Manuel, es tu là?
Je peux pas: j'ai piscine!
-
Dagda
- Fondateur
- Messages : 2226
- Enregistré le : 08 mars 2024, 17:16
- Localisation : Est parisien (94)
- Contact :
Re: Table tournante pour mesure polaire en automatique !
Généralement je fais les mesures seul, et je ne connais pas de Manuel dans mon entourage ... 
https://www.youtube.com/@SoundPixelLab
La tolérance atteindra un tel niveau que les personnes intelligentes seront interdites de toutes réflexions pour ne pas offenser les imbéciles.
La tolérance atteindra un tel niveau que les personnes intelligentes seront interdites de toutes réflexions pour ne pas offenser les imbéciles.
Re: Table tournante pour mesure polaire en automatique !
Tu fais ça pour Halloween? Bonne époque pour faire tourner les tables...
Je peux pas: j'ai piscine!
-
Dagda
- Fondateur
- Messages : 2226
- Enregistré le : 08 mars 2024, 17:16
- Localisation : Est parisien (94)
- Contact :
Re: Table tournante pour mesure polaire en automatique !
Ah ... Dommage elle ne sera pas terminée d'ici là 
https://www.youtube.com/@SoundPixelLab
La tolérance atteindra un tel niveau que les personnes intelligentes seront interdites de toutes réflexions pour ne pas offenser les imbéciles.
La tolérance atteindra un tel niveau que les personnes intelligentes seront interdites de toutes réflexions pour ne pas offenser les imbéciles.
-
Dagda
- Fondateur
- Messages : 2226
- Enregistré le : 08 mars 2024, 17:16
- Localisation : Est parisien (94)
- Contact :
Re: Table tournante pour mesure polaire en automatique !
J'ai les pieds et la peinture ...

Je reçois bientôt des bricoles pour la partie motorisation ...
D.
Je reçois bientôt des bricoles pour la partie motorisation ...
D.
https://www.youtube.com/@SoundPixelLab
La tolérance atteindra un tel niveau que les personnes intelligentes seront interdites de toutes réflexions pour ne pas offenser les imbéciles.
La tolérance atteindra un tel niveau que les personnes intelligentes seront interdites de toutes réflexions pour ne pas offenser les imbéciles.
-
Dagda
- Fondateur
- Messages : 2226
- Enregistré le : 08 mars 2024, 17:16
- Localisation : Est parisien (94)
- Contact :
Re: Table tournante pour mesure polaire en automatique !
Et on avance encore un peu
J'ai fait les trous pour les trois pieds et je fais un petit montage à blanc pour voir ce que ça donne.

Je creuse la forme des écrous ...


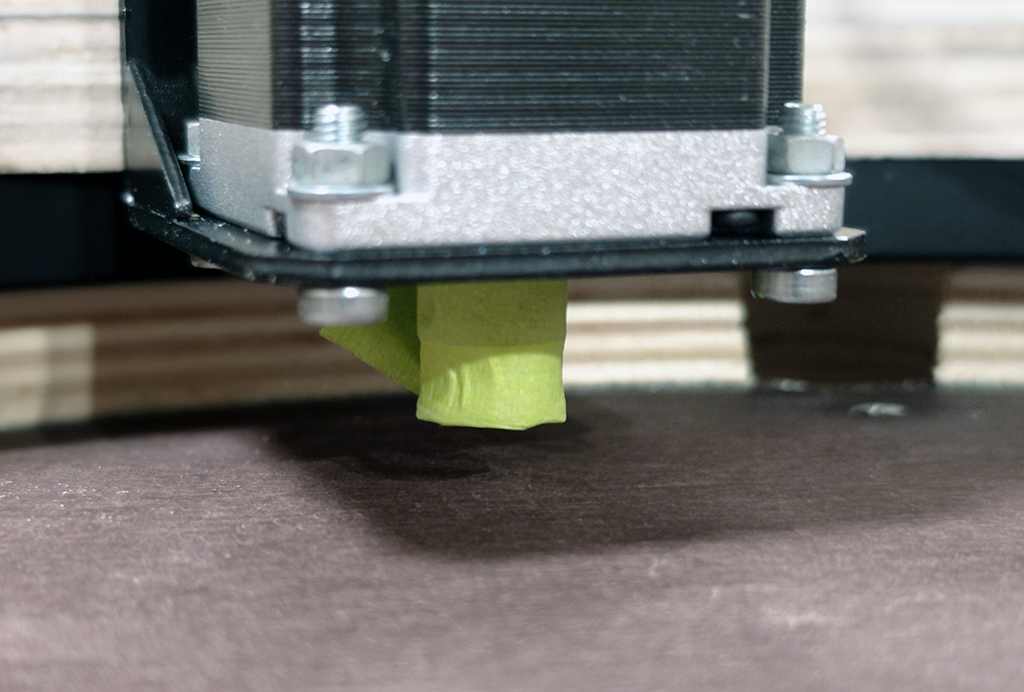
Je positionne le moteur.
Il est à raz du dessous du piètement et la poulie d'entrainement est à quelques millimètres du plateau tournant.

Sans oublier l'emplacement pour le connecteur d'alimentation du moteur.

Ensuite, un peu de colle époxy pour figer les écrous dans les empreintes.

Petite astuce pour fixer la grande couronne / roulement.
Un trou sous une des platines pour accéder aux emplacements des vis.

Un dernier ponçage

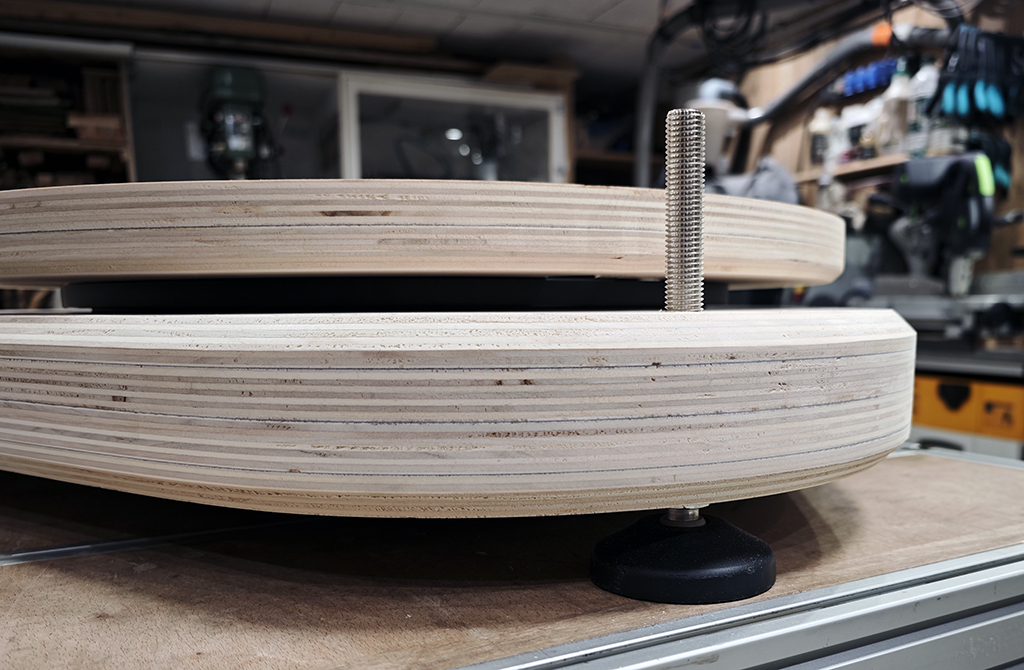
Les grandes tiges filetées des vis ont été raccourcie et j'ai fait une petite entaille pour pouvoir utiliser un tournevis par le dessus afin de régler le niveau de la table.

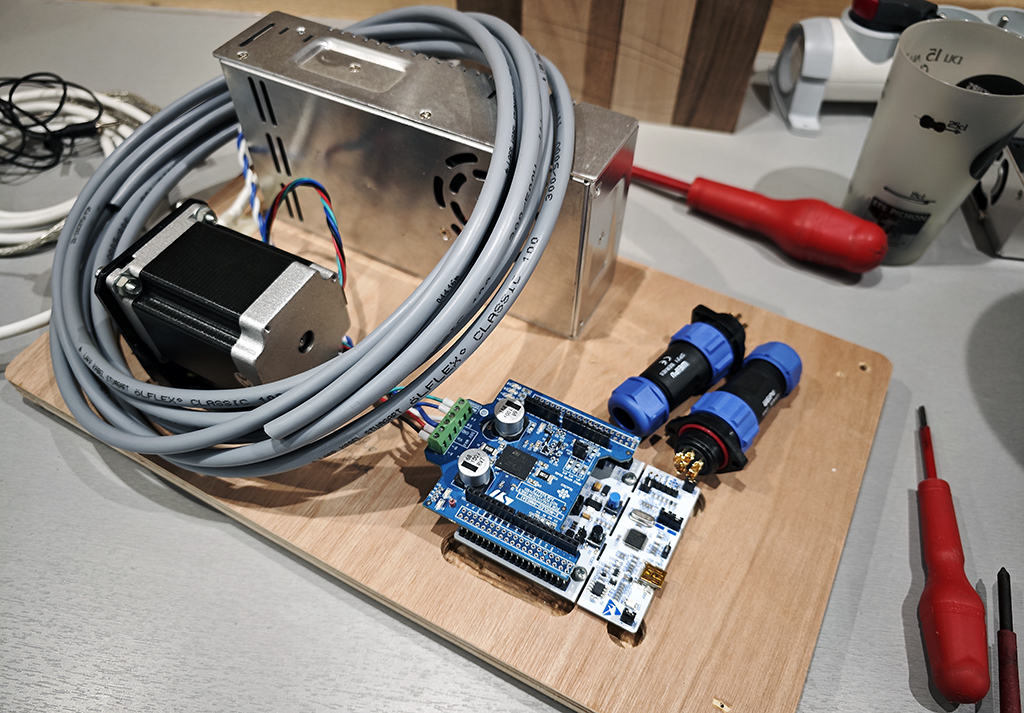
Et j'ai maintenant le câblage avec les prises et fiches (5 pôles).
J'ai changé le "cerveau" du montage puisque, même si l'ancien modèle de STM32 est censé fonctionner avec la carte driver moteur, je n'y arrive pas.
Comme il y a des "pré-programmes" tout fait pour un autre modèle de carte, j'ai donc changé.
Voilà")
Il faut que je fasse de la peinture maintenant.
Et que je me penche sur la programmation ... mais j'ai un joker au cas où ...
D.
J'ai fait les trous pour les trois pieds et je fais un petit montage à blanc pour voir ce que ça donne.
Je creuse la forme des écrous ...
Je positionne le moteur.
Il est à raz du dessous du piètement et la poulie d'entrainement est à quelques millimètres du plateau tournant.
Sans oublier l'emplacement pour le connecteur d'alimentation du moteur.
Ensuite, un peu de colle époxy pour figer les écrous dans les empreintes.
Petite astuce pour fixer la grande couronne / roulement.
Un trou sous une des platines pour accéder aux emplacements des vis.
Un dernier ponçage
Les grandes tiges filetées des vis ont été raccourcie et j'ai fait une petite entaille pour pouvoir utiliser un tournevis par le dessus afin de régler le niveau de la table.
Et j'ai maintenant le câblage avec les prises et fiches (5 pôles).
J'ai changé le "cerveau" du montage puisque, même si l'ancien modèle de STM32 est censé fonctionner avec la carte driver moteur, je n'y arrive pas.
Comme il y a des "pré-programmes" tout fait pour un autre modèle de carte, j'ai donc changé.
Voilà
Il faut que je fasse de la peinture maintenant.
Et que je me penche sur la programmation ... mais j'ai un joker au cas où ...
D.
https://www.youtube.com/@SoundPixelLab
La tolérance atteindra un tel niveau que les personnes intelligentes seront interdites de toutes réflexions pour ne pas offenser les imbéciles.
La tolérance atteindra un tel niveau que les personnes intelligentes seront interdites de toutes réflexions pour ne pas offenser les imbéciles.
Re: Table tournante pour mesure polaire en automatique !
le plateau va tourner de combien de degré à chaque mesure ?
-
Dagda
- Fondateur
- Messages : 2226
- Enregistré le : 08 mars 2024, 17:16
- Localisation : Est parisien (94)
- Contact :
Re: Table tournante pour mesure polaire en automatique !
Comme tu veux, c'est un moteur pas à pas qui va faire le job.
Donc, de manière classique des pas de 10° mais si tu veux faire par pas de 1° c'est possible aussi.
Hier soir première couche de peinture un peu chargée pour faire une base.
D.
Donc, de manière classique des pas de 10° mais si tu veux faire par pas de 1° c'est possible aussi.
Hier soir première couche de peinture un peu chargée pour faire une base.
D.
https://www.youtube.com/@SoundPixelLab
La tolérance atteindra un tel niveau que les personnes intelligentes seront interdites de toutes réflexions pour ne pas offenser les imbéciles.
La tolérance atteindra un tel niveau que les personnes intelligentes seront interdites de toutes réflexions pour ne pas offenser les imbéciles.
-
Dagda
- Fondateur
- Messages : 2226
- Enregistré le : 08 mars 2024, 17:16
- Localisation : Est parisien (94)
- Contact :
Re: Table tournante pour mesure polaire en automatique !
Petit travail du soir.
Un coup de scie tout les 10 degrés ...
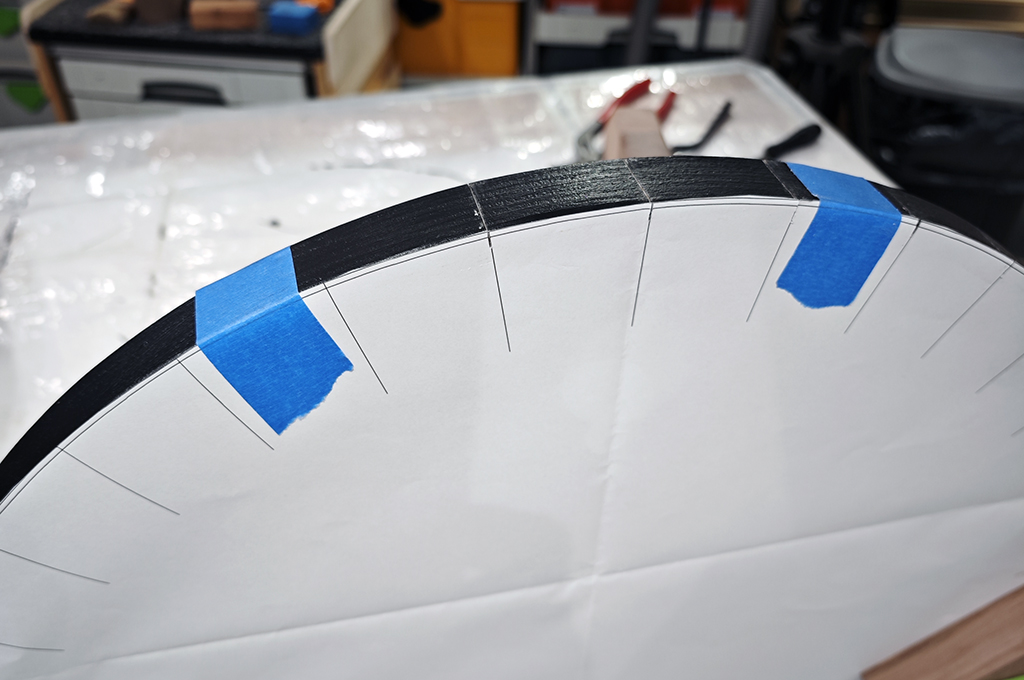
Un coup de lime carré pour avoir un biseau ...
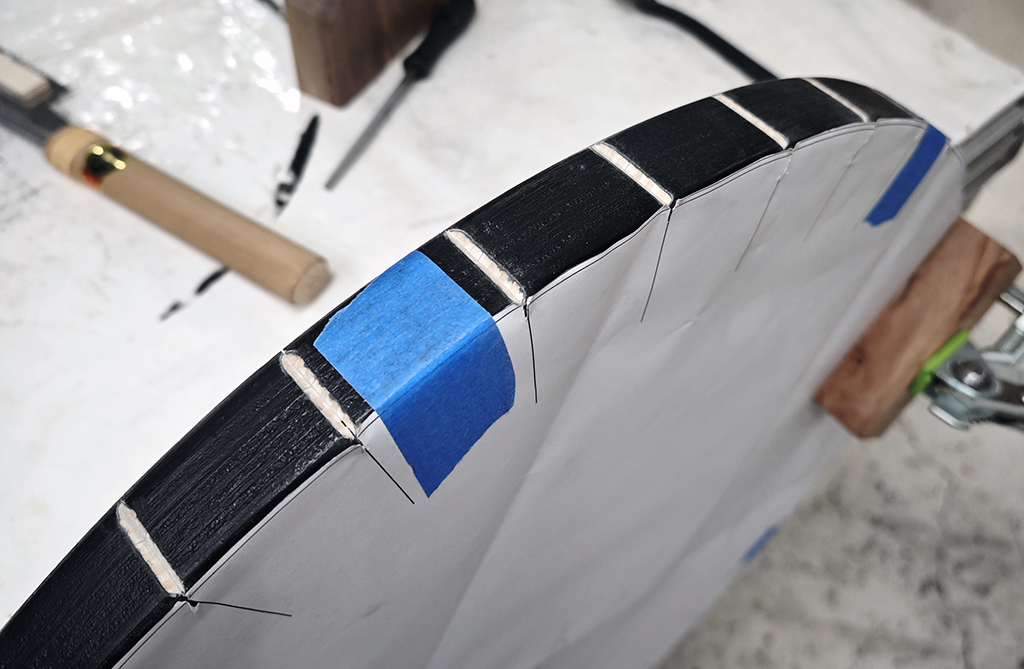
Et un bon coup de peinture Warnex au rouleau ...
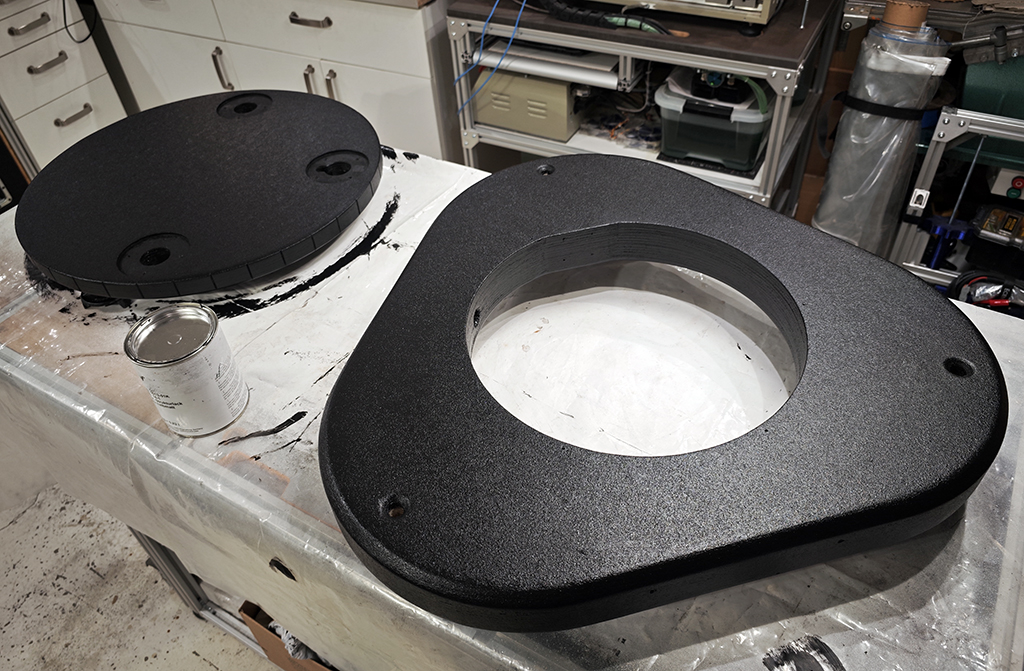
Elle va bientôt être sur pied la petite !
D.
Un coup de scie tout les 10 degrés ...
Un coup de lime carré pour avoir un biseau ...
Et un bon coup de peinture Warnex au rouleau ...
Elle va bientôt être sur pied la petite !
D.
https://www.youtube.com/@SoundPixelLab
La tolérance atteindra un tel niveau que les personnes intelligentes seront interdites de toutes réflexions pour ne pas offenser les imbéciles.
La tolérance atteindra un tel niveau que les personnes intelligentes seront interdites de toutes réflexions pour ne pas offenser les imbéciles.