La suite; la suite, la suite !
Aller on détail un peu.
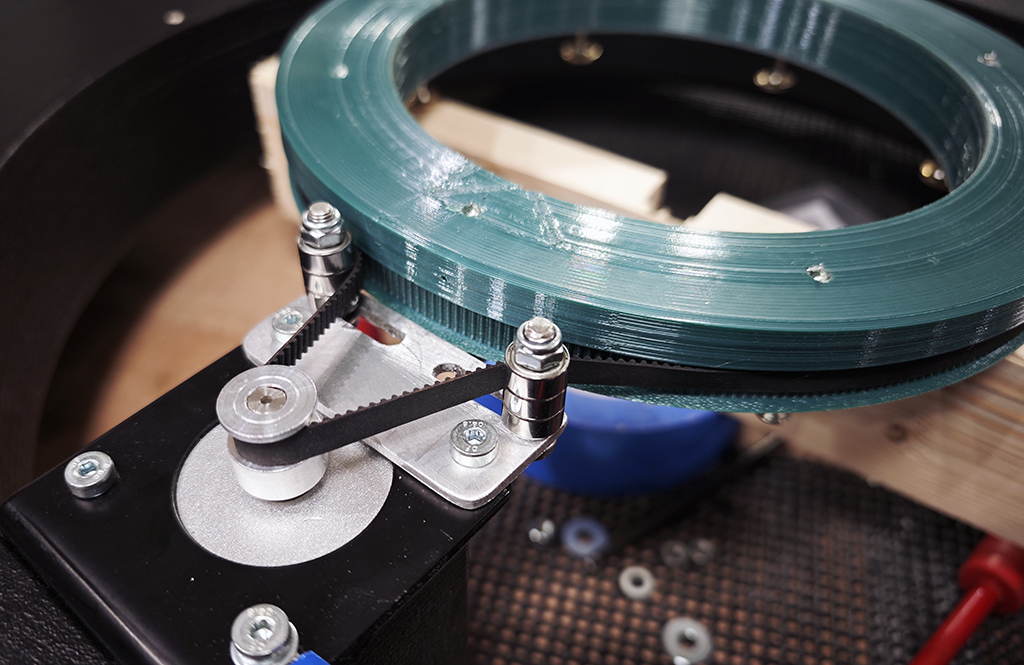
Le roulement est un grand truc prévu initialement pour les plateaux tournants des tables de restaurants.

C'est initialement avec 3 tampons anti-dérapant par bague aux niveau des trous.
Je les ai supprimés et comme il y avait 3 autres pré-trous, je les ai percés complètement pour avoir 6 points de fixations.
Les deux bagues sont décalées en hauteur l'une de l'autre (logique).
On peut voir les billes ici

Je place le roulement sur le plateau et je le visse.

Sur le plateau, j'ai une ouverture sur le plateau pour accéder aux trous du roulement afin de le visser sur la base.

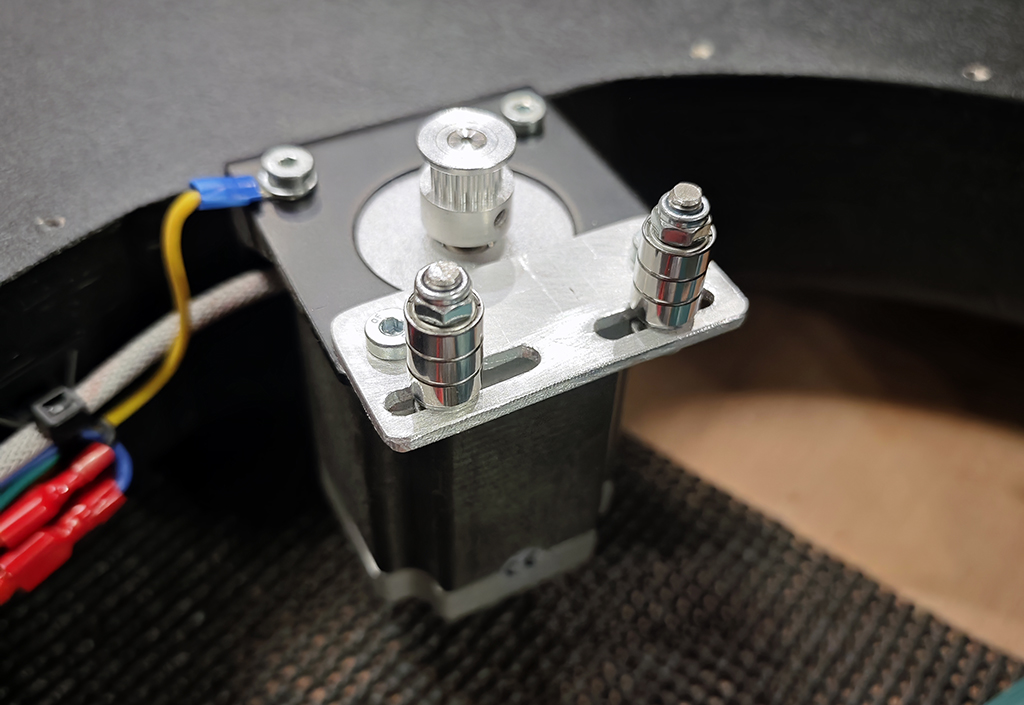
Au niveau de la base, le moteur sur son support.
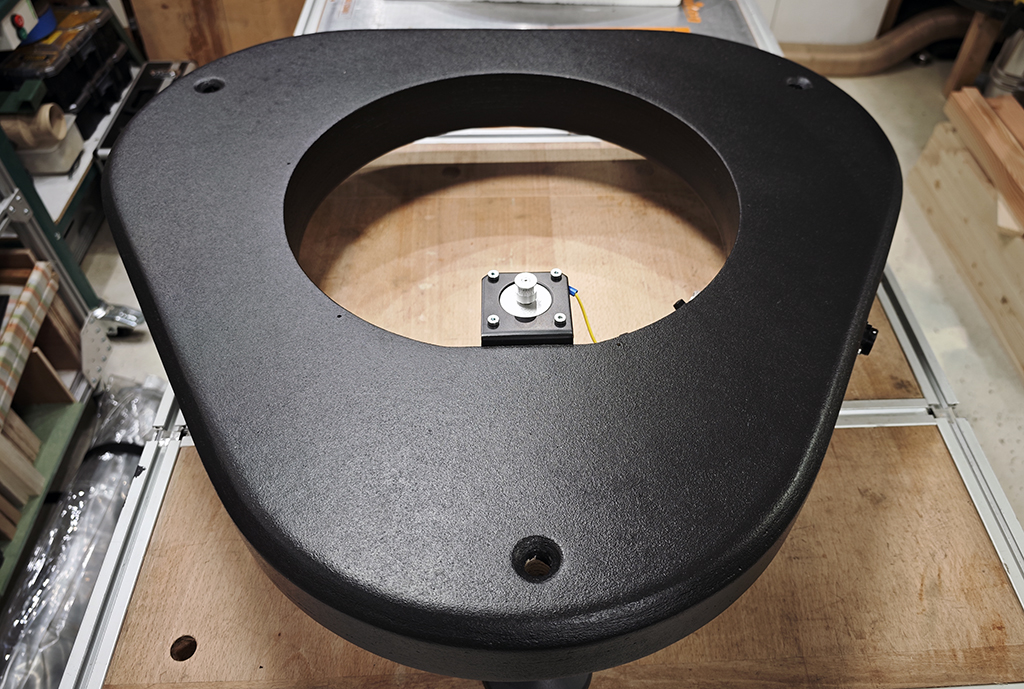
Petit câblage pour aller jusqu'à la prise sur le côté de la base.

Je place le plateau sur la base

Et hop, je le visse en prenant soin de contrôler qu'il est centré en rotation et qu'il n'y a pas de points durs lors de la rotation.

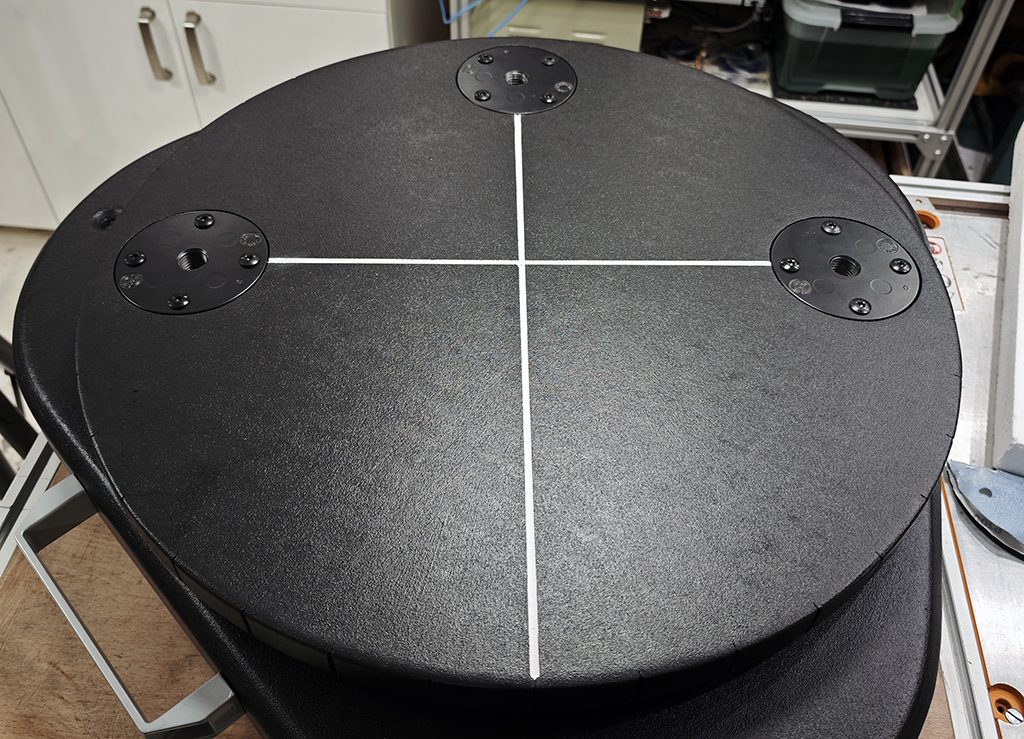
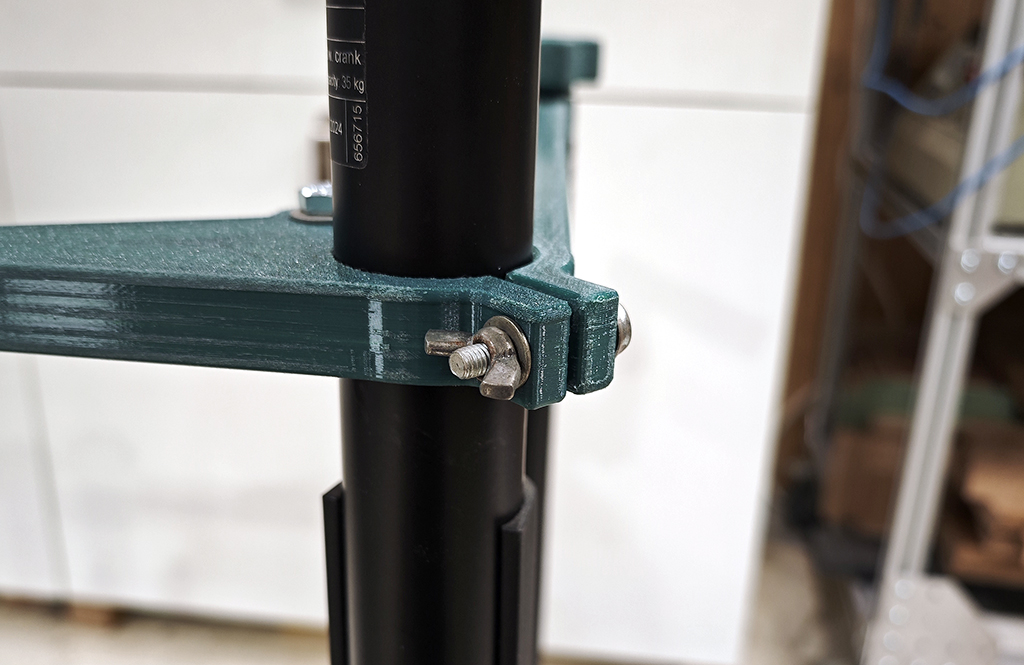
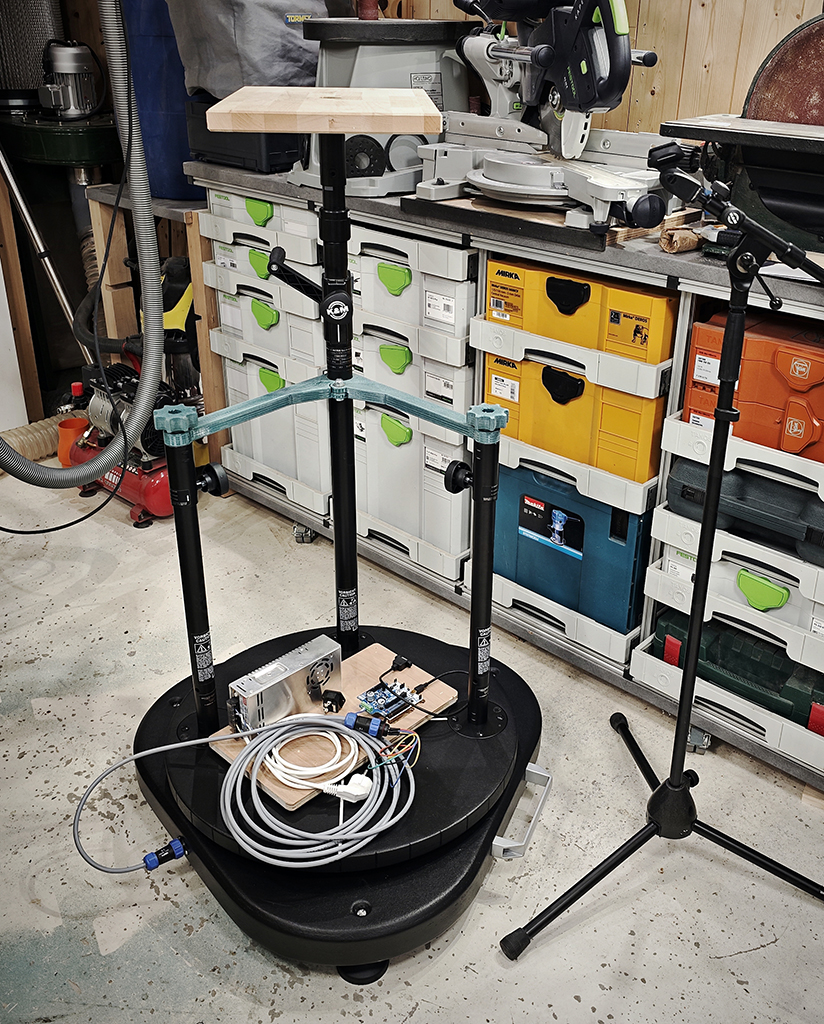
Une fois tout bien en place, je monte les trois platines sur lesquelles viendront se visser le pied télescopique et les deux petits pieds de stabilisation.

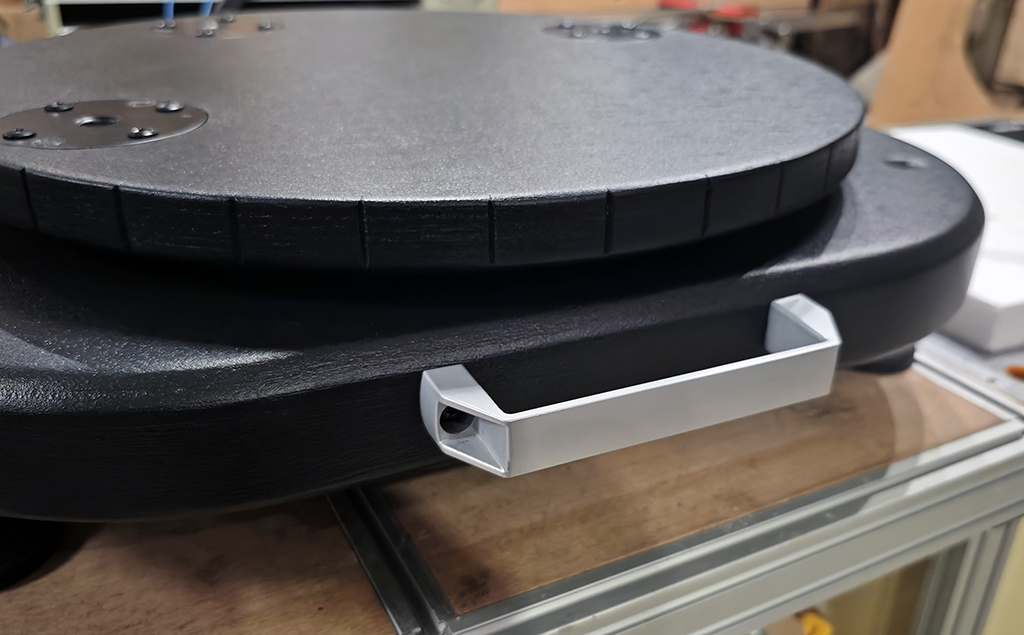
Une poignée pour facilité la manipulation
Si on retourne la bête on a accès au moteur.
C'est donc un entrainement par courroie.

Et j'ai trouvé une petite routine pour générer des poulies pour courroies GT2 de la taille que je veux (configuration multiple).
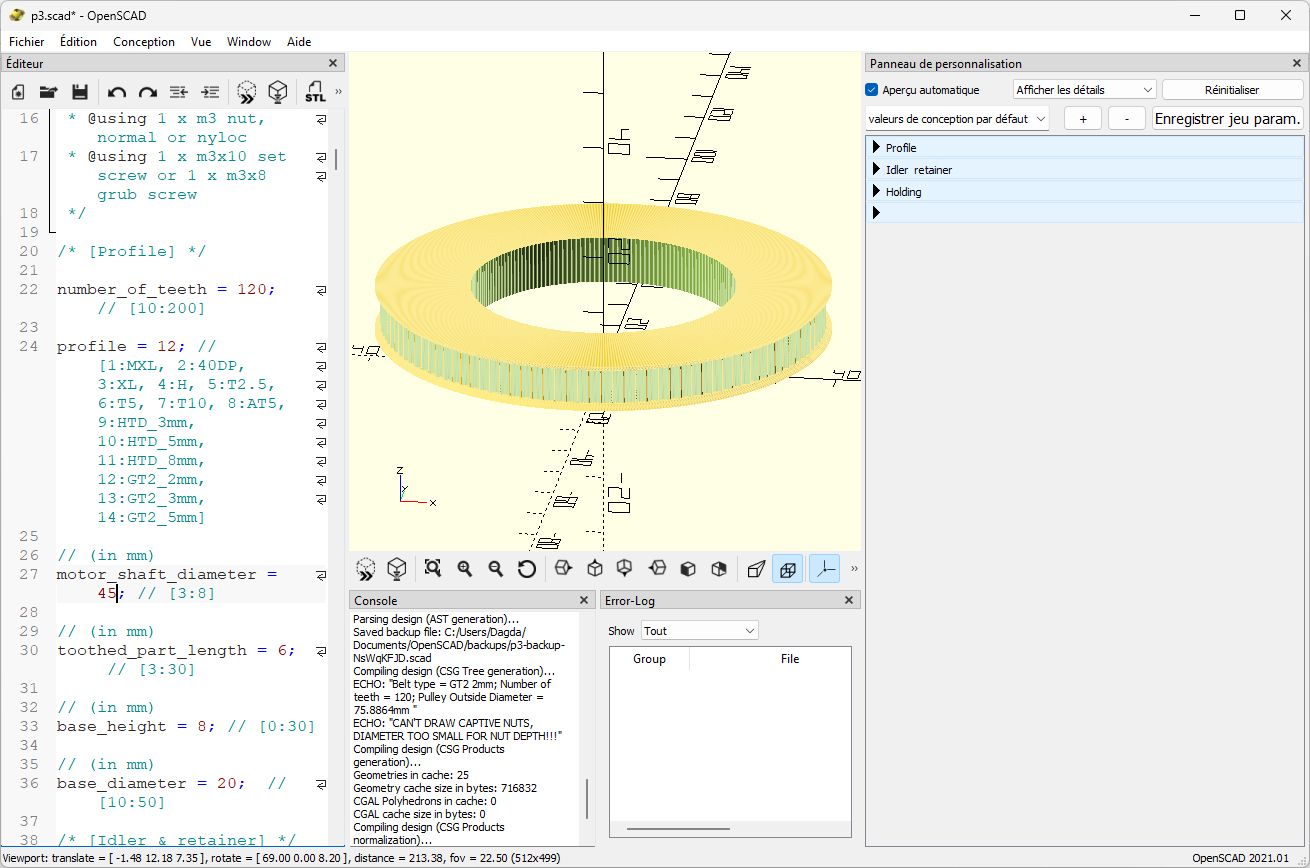
Voilà
")
Donc, il faut que je regarde le diamètre de la poulie que je peux mettre avec la courroie que j'ai. Il faudra probablement un tendeur.
Ensuite il faut que je fasse un montage pour lier le pied telescopique et les deux pieds de stabilisation.
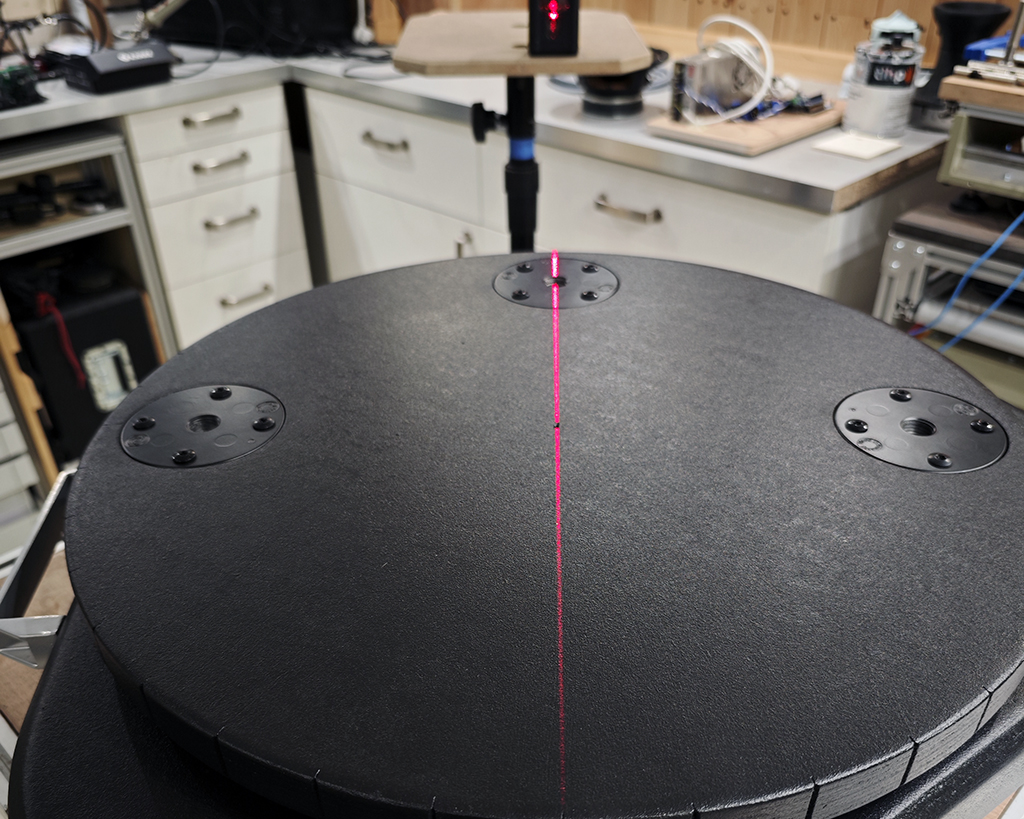
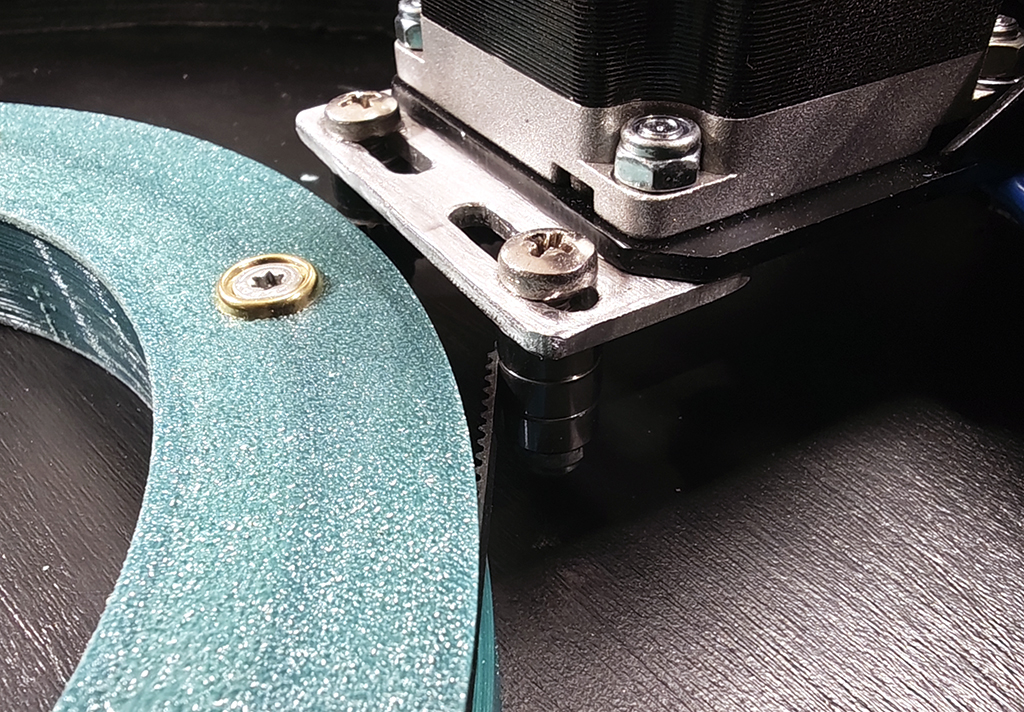
Un petit repère pour mettre en face des marques du plateau.
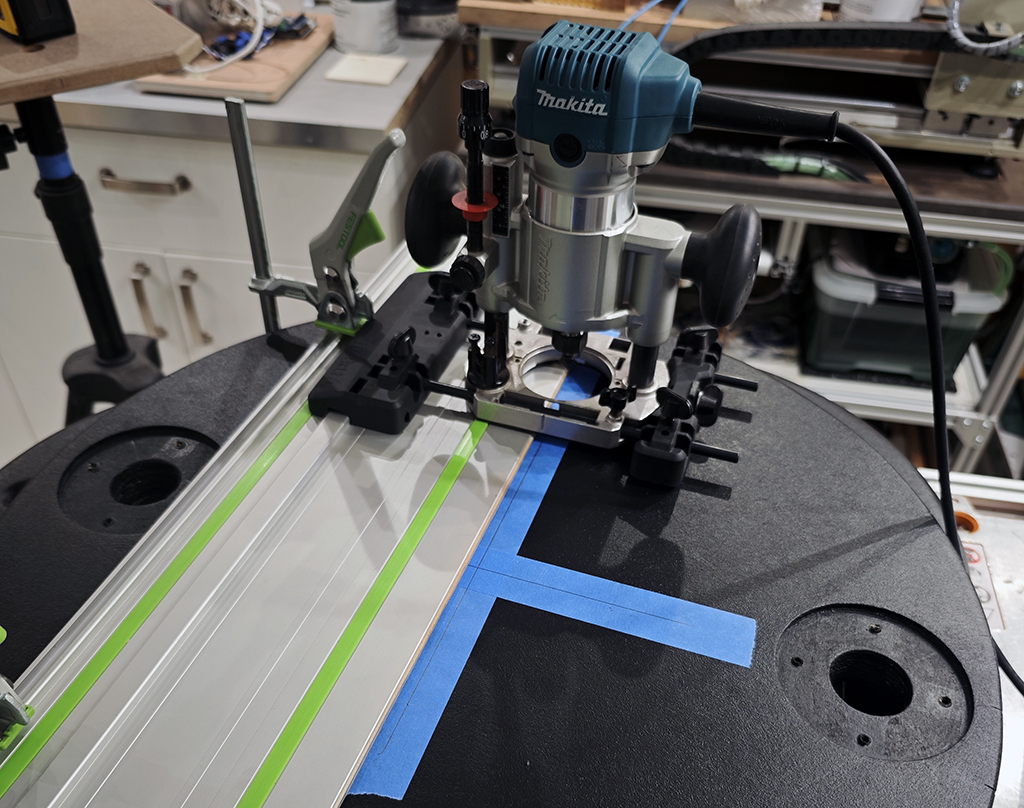
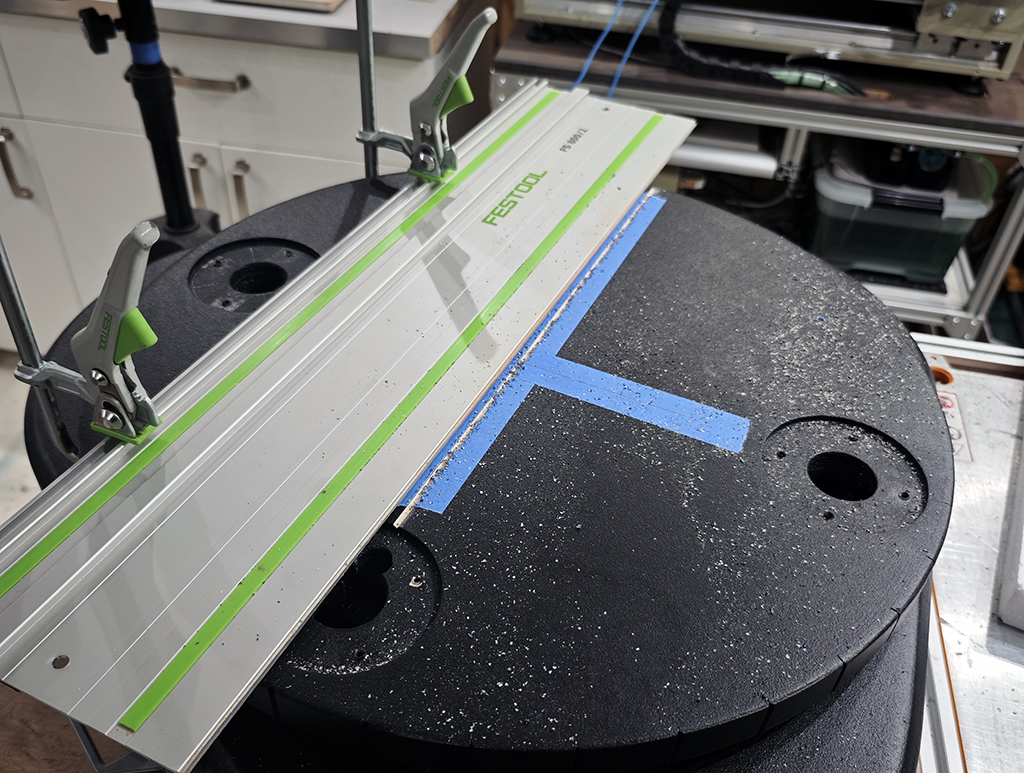
Et il faut que je marque le centre du plateau pour tracer une croix de centrage.
Bon, et puis ... toute la programmation pour faire tourner le moteur, créer une petite interface de contrôle, et ensuite automatiser le tout avec REW (et ses API).
D.